

This is a demo of millimeter-wave vehicle-to-vehicle (V2V) communication for sharing sensing data among autonomous driving vehicles.
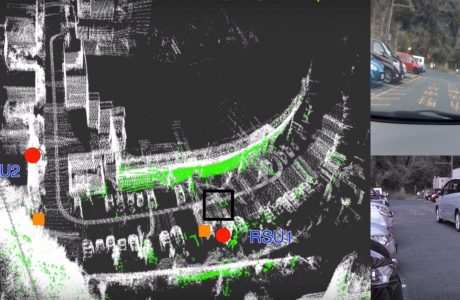
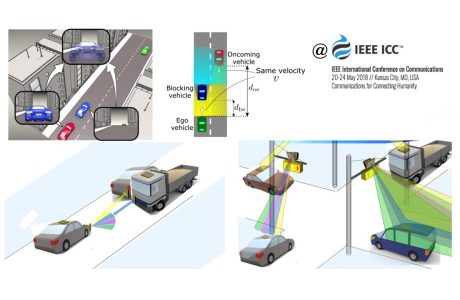
In this demo, in order to improve the traffic efficiency and safety by cooperative perception, the sensing data of 3D-LiDAR is shared among autonomous driving Kobuki through the high-speed and low-latency millimeter wave communication. The data flow among Kobuki through mmWave communication is controlled by a SDN controller. Due to the cooperative perception, Kobuki has an extended view, and is able to get the traffic information beyond line-of-sight and field-of-view.






Comments are closed.