
This is a demo of SDN-based millimeter-wave V2X (Vehicle-to-Everything) communication and cooperative perception for safe autonomous driving.
Experiment Environment
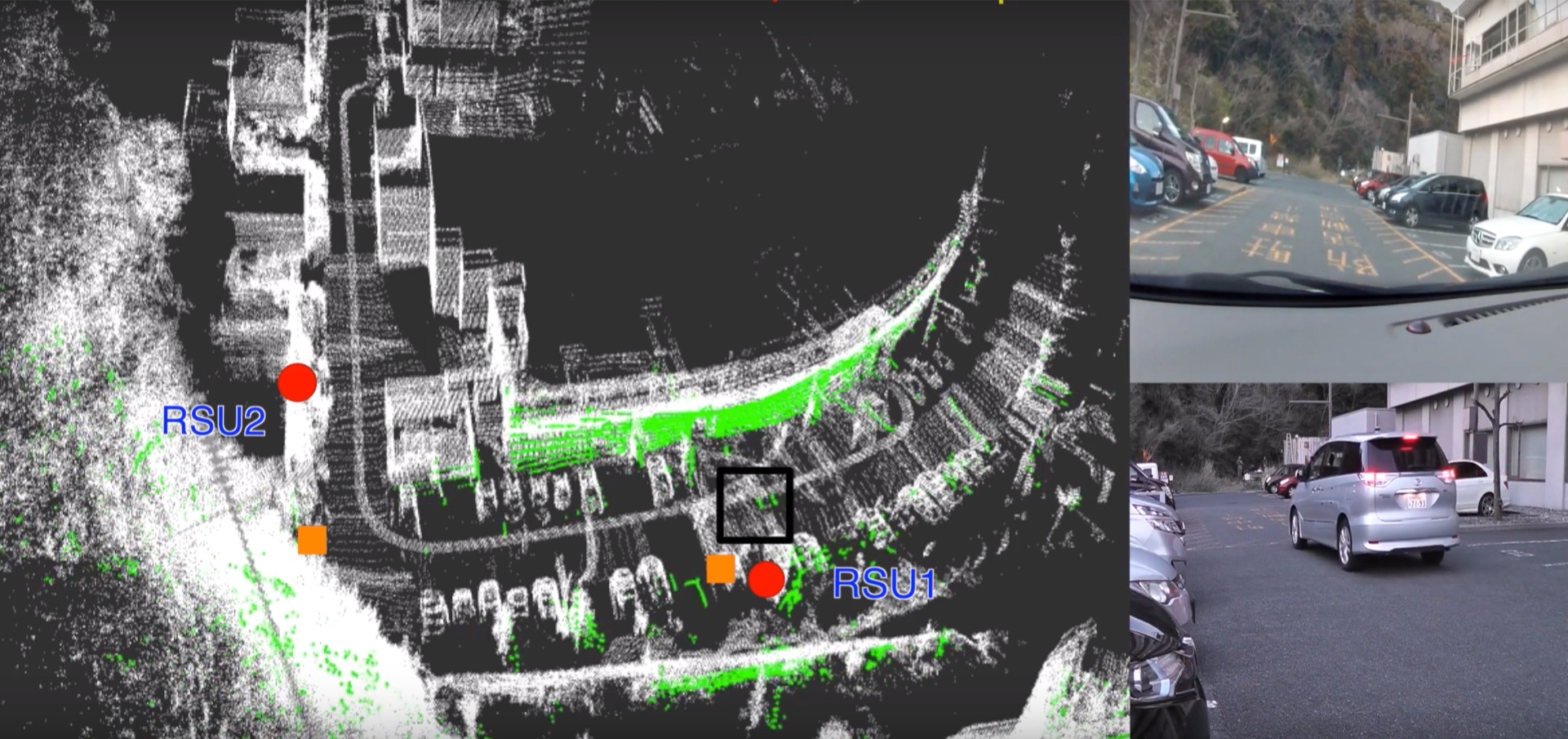
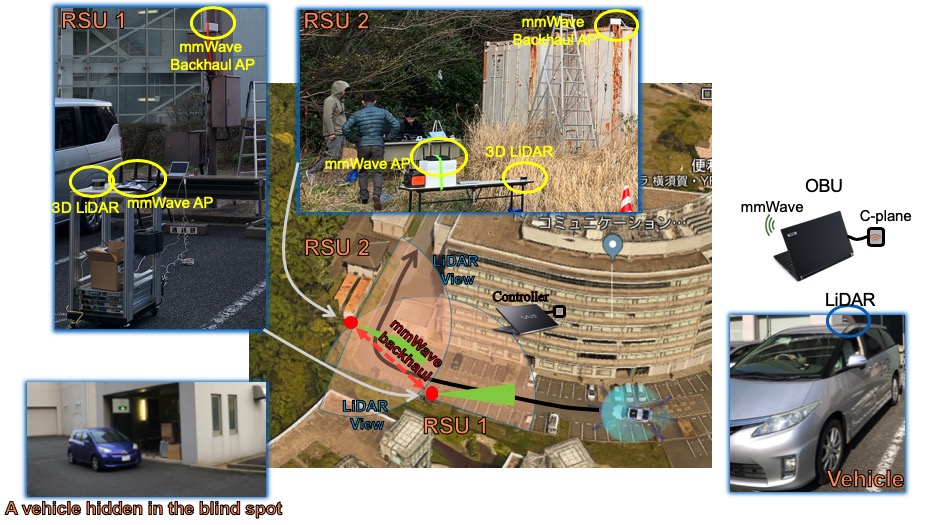
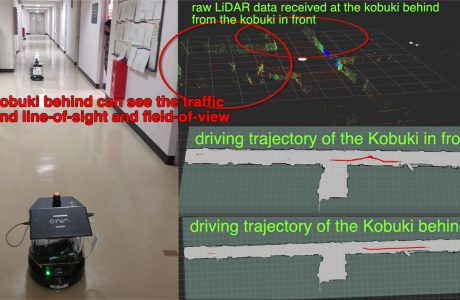
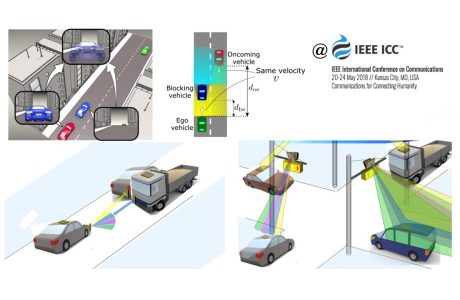
In this proof-of-concept, the roadside units (RSUs) use 3D-LiDARs to create the real-time dynamic 3D-map, and share them through millimeter-wave communication with other RSUs. The vehicle communicates with the RSU through millimeter-wave V2X, and get the merged global real-time dynamic 3D-map to extend its perception area by cooperative perception and to improve the traffic safety and efficiency. All the connections and data flow in the network are controlled by a SDN controller through the control plane.
Please watch the following demo video.






Comments are closed.